Сеть пирамидальных признаков
Сеть пирамидальных признаков (feature pyramid network, FPN, [1]) - скорее не отдельный метод �детектирования объектов, а концепция улучшенного извлечения признаков, показавшая улучшение в моделях Fast/Faster R-CNN.
Ниже показано сравнение архитектур извлечения признаков в архитектурах YOLO (a), SSD (b) и в предложенной архитектуре FPN (c) [1]:
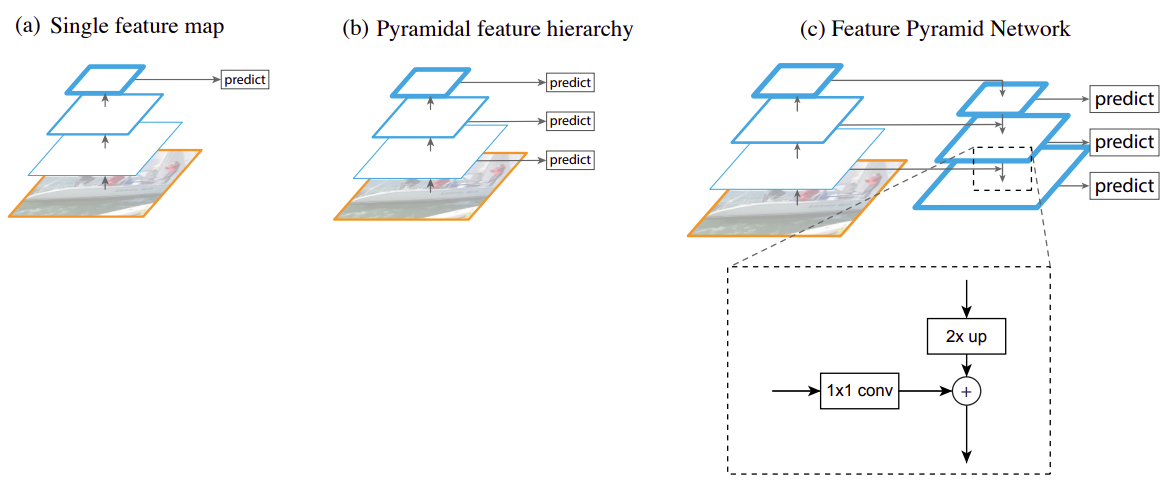
Левая часть во всех архитектурах использует свёрточные слои одной из успешных сетей для классификации изображений, таких как VGG и ResNet, которые можно дообучить для задачи детекции. Каждый следующий слой левой части извлекает всё более сложные признаки, при этом пространственное разрешение с каждым следующим слоем понижается. Серию преобразований с понижением пространственного разрешения будем называть кодировочной частью.
В архитектуре YOLO (a) детектор работает на последнем свёрточном слое, что позволяет точно определять тип объекта, но его координаты определяются неточно из-за низкого пространственного разрешения используемых карт признаков (eature maps). Также у YOLO возникают проблемы �с детекцией малых объектов, различимых лишь в высоком разрешении.
Эти трудности были отчасти преодолены в архитектуре SSD (b), где детекция производилась на разных промежуточных представлениях изображения. Однако качество этой детекции на более ранних слоях было невысоким из-за того, что на этих слоях извлекались несложные признаки, такие как границы и другие простейшие паттерны.
В архитектуре FPN (c) предлагается дополнить левую кодировочную часть с понижением пространственного разрешения правой декодировочной частью с повышением разрешения, а детекцию производить на разных слоях декодировочной части.
Это даёт следующие преимущества:
-
Поскольку детекция производится на разных слоях декодировочной части с разным пространственным разрешением, то детектор сможет хорошо извлекать как большие объекты (с малых пространственных разрешений), так и малые (с больших пространственных разрешений).
-
Независимо от используемого слоя декодировочной части, признаки будут сложными и высокоуровневыми, поскольку они интегрируют в себе признаки, полученные с последнего слоя кодировоч�ной части. Это позволит детектору извлекать сложные объекты независимо от слоя, на котором он работает.
В архитектуре FPN предлагалось производить детекцию серией одинаковых (независимо от слоя декодировщика) свёрточных слоёв, настроенных опознавать класс и уточнять координаты выделяющей рамки (bounding box) относительно шаблонных рамок (anchor boxes), использованных в SSD.
В сети FPN в декодировщике пространственное разрешение повышается на каждом слое одним из методов повышения разрешения (в оригинальной статье использовалась интерполяция ближайшим соседом). Для того, чтобы лучше сохранить информацию о расположениях объектов, соответствующее внутреннее представление с кодировочной части прибавлялось к внутреннему представлению декодировочной части, что на рисунке показано горизонтальными связями между слоями. Перед прибавлением внутреннее кодировочное представление обрабатывалось свёртой 1x1, чтобы выходное число каналов совпало с числом каналов представления в декодировщике. В декодировщике на каждом слое использовалось одно и то же число каналов (256), поскольку на каждом слое впоследствии применялась одна и та же модель детекции. Результат суммы представлений в кодировщике и декодировщике обрабатывался свёрткой 3x3, чтобы сгладить артефакты интерполяции при повышении разрешения, после чего результат передавался на следующий слой декодировщика.