DBSCAN
Рассмотренные ранее методы ищут кластеры сферической или эллиптической формы и требуют заранее задать число кластеров . Однако в реальных данных кластеры могут иметь сложную геометрическую структуру (например, вложенные кольца, ленточные структуры произвольной формы) и содержать шум.
Для решения таких задач разработан ал�горитм DBSCAN (Density-Based Spatial Clustering of Applications with Noise [1]).
В предположении алгоритма кластеры — это области высокой плотности точек, разделенные областями низкой плотности. Точки в областях низкой плотности считаются шумом (выбросами). Алгоритм использует локальные плотностные характеристики точек данных для их объединения в кластеры.
Основные определения
Плотность в точке определяется количеством соседей, попадающих в радиус (включая саму точку). Алгоритм опирается на два гиперпараметра:
- — радиус окрестности.
- — минимальное количество точек в окрестности для того, чтобы считать область плотной.
Все точки классифицируются на три типа:
-
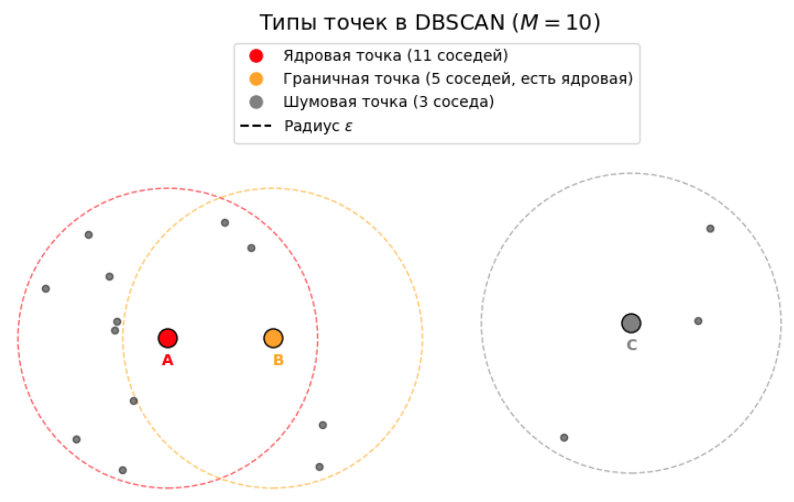
Ядровая точка (core point): Точка объявляется ядровой, если в её -окрестности находится не менее точек.
-
Граничная точка (border point): Точка объявляется граничной, е�сли в её -окрестности находится меньше точек, но она содержит в своей окрестности хотя бы одну ядровую точку.
-
Шумовая точка (noise point): Точка, которая не является ни ядровой, ни граничной.
Ниже проиллюстрированы точки A, B и C, которые являются ядровой, граничной и шумовой соответственно при :
Алгоритм DBSCAN
Логика работы DBSCAN отличается от итеративного пересчета центров. Кластеризация выполняется следующим образом:
-
Определение типов точек: Для всего датасета определяются ядровые, граничные и шумовые точки при заданных параметрах .
-
Построение графа ядровых точек: Создается граф, вершинами которого являются только ядровые точки. Ребро между двумя ядровыми точками добавляется тог�да и только тогда, когда расстояние между ними не превышает .
-
Поиск компонент связности: В этом графе находятся все связные компоненты. Каждая связная компонента и является искомым кластером.
-
Привязка граничных точек: Каждая граничная точка приписывается к той компоненте связности (кластеру), с которой она лучше всего связана (находится в -окрестности ядровой точки этого кластера).
-
Формирование результата: Точки каждой компоненты вместе с приписанными граничными точками возвращаются как кластеры. Шумовые точки помечаются как выбросы.
В отличие от центроидных методов (K-means), которые тяготеют к выпуклым (сферическим) кластерам, DBSCAN корректно выделяет кластеры любой геометрической формы. Ниже показано сравнение кластеризации методом K-средних и DBSCAN:
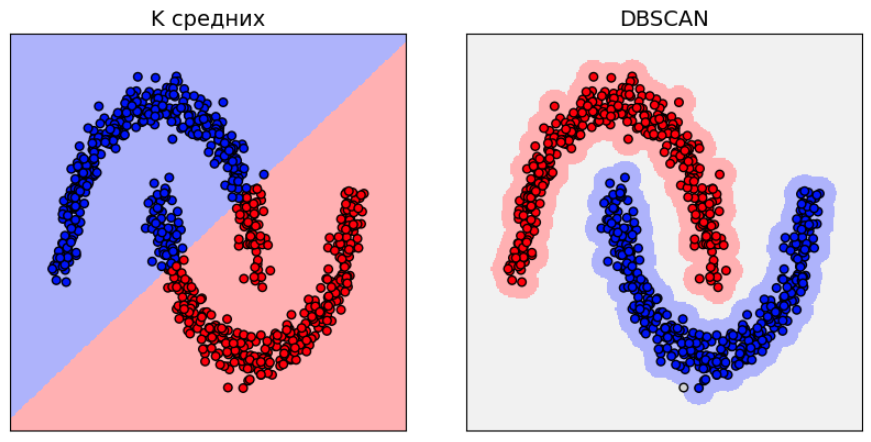
Обратим внимание, что за пределами небольшой окрестности кластеров точки в DBSCAN будут относиться к шуму, поэтому большая часть признакового пространства не закрашена.
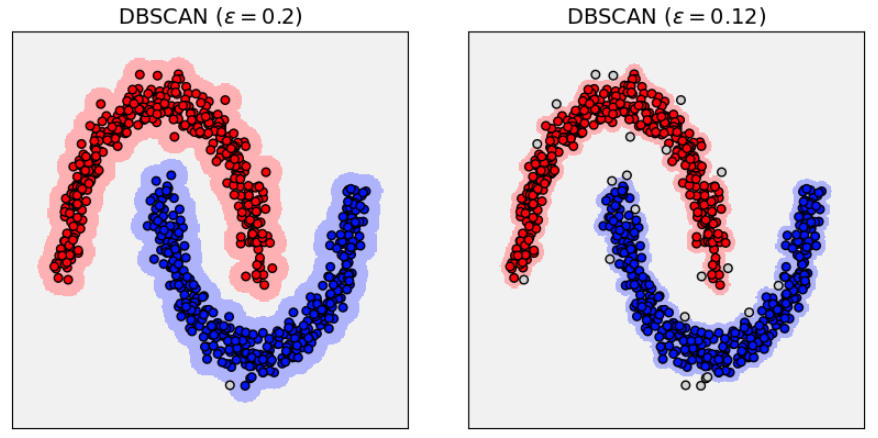
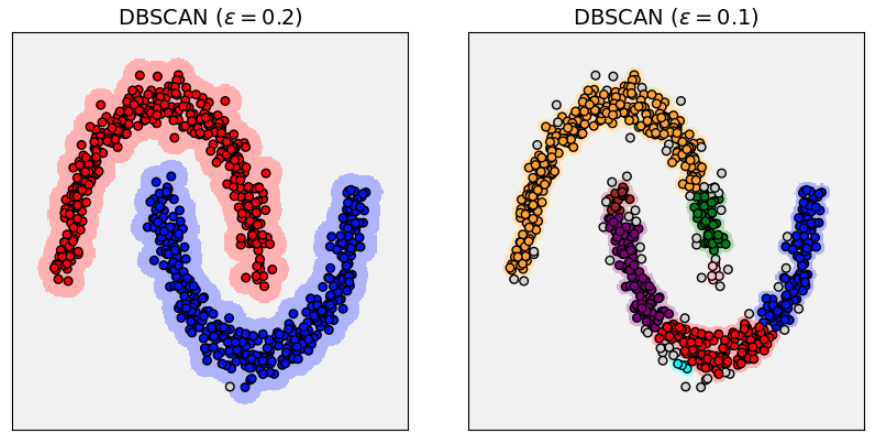
При уменьшении будет возрастать число точек, отнесённых к шуму:
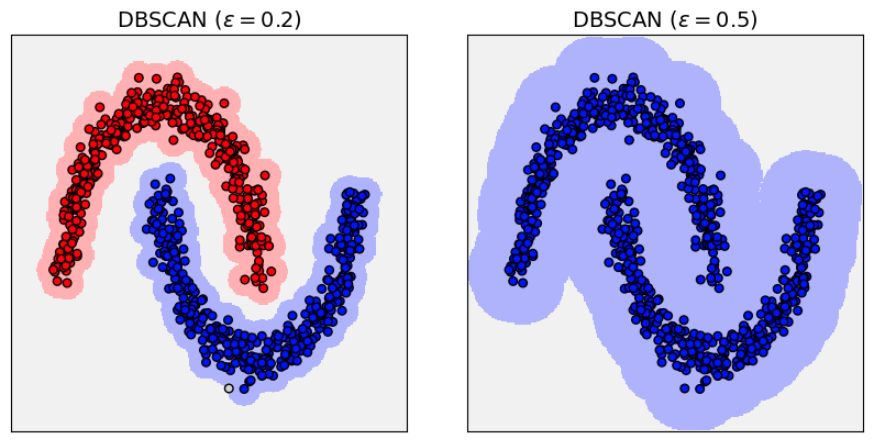
Формально алгоритм самостоятельно определяет число кластеров. Однако фактическое число кластеров будет зависеть от выбора гиперпараметров и .
При слишком большом группы объектов будут сливаться в один кластер:
А при слишком малом группы будут разбиваться на более мелкие кластера за счёт небольших вариаций в плотности точек в рамках каждой группы:
Выбор гиперпараметров
В оригинальной статье [1] предлагается выбрать небольшой константой (тем выше, чем выше априорные ожидания об уровне шума в данных), а гиперпараметр предлагается выбрать следующим образом:
-
Для каждой точки из датасета вычисляется расстояние до её -го ближайшего соседа.
-
Полученные значения расстояний сортируются по убыванию.
-
Строится график, где по оси X откладывается индекс точки в отсортированном списке, а по оси Y — значение расстояния.
-
На графике визуально определяется точка максимального перегиба («локтя» или «колена»). Значение расстояния по оси Y в этой точке принимается в качестве .
Логика метода основывается на том, что внутри плотного кластера расстояние до -го соседа для большинства точек будет небольшим и примерно одинаковым (формируя пологую часть графика, "плато").
Напротив, для шумовых точек и выбросов, находящихся в разреженных областях, -й сосед будет находиться значительно дальше, что даст резкий скачок значений на графике (крутая часть слева).
Точка перегиба является порогом, разделяющим эти два режима: выбрав на уровне этого излома, мы классифицируем точки с аномально большими расстояниями как шум, а остальные — как кандидатов в ядровые или граничные точки.
Проблема переменной плотности
Алгоритм DBSCAN использует глобальный параметр , что затрудняет выделение этим методом кластеров переменной плотности. Рассмотрим, например, следующий пример данных:
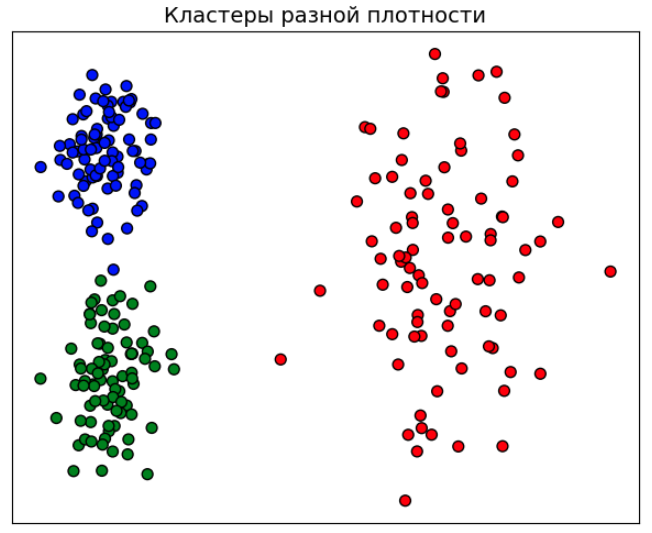
Если выбрать слишком большим, то зелёный и синий кластера сольются в один кластер. Если же выбрать слишком малым, то почти все точки красного более разреженного кластера будут отнесены к шуму.