Автокодировщик
Идея
Автокодировщик (autoencoder) - это нейросеть , которой по входу требуется сгенерировать выход максимально похожий на вход. Для настройки автокодировщика обычно используется квадрат L2-потерь:
Поскольку в качестве целевой переменной (отклика) выступает исходное признаковое описание объекта без меток, то это задача обучения без учителя (unsupervised learning).
Структурно автокодировщик состоит из
-
кодировщика (encoder)
-
и декодировщика (decoder) :
Кодировщик преобразует исходный объект в его внутреннее признаковое представление , называемое эмбеддингом (embedding), а декодировщик пытается по эмбеддингу объекта восстановить исходный объект.
Чтобы избежать тривиального решения задачи, когда автокодировщик настраивается повторять тождественное преобразование , на архитектуру / процесс настройки весов накладываются некоторые ограничения, делающие задачу восстановления исх�одного объекта нетривиальной.
Самый простой случай - потребовать, чтобы размерность эмбеддинга была существенно меньше, чем размерность исходного объекта.
Применения автокодировщика
-
Предобучение (pretraining). Если для конечной задачи обучения с учителем обучающая выборка мала, но есть много неразмеченных объектов , , то можно на большой неразмеченной выборки настроить автокодировщик , а потом инициализировать первые слои сети, решающей целевую задачу слоями кодировщика , то есть применить трансферное обучение. Таким образом, даже без использования меток мы получим перевод объекта из исходного пространства низкоуровневых признаков в высокоуровневые , с которыми проще работать. По сути, кодировщик осуществляет нелинейное снижение размерности признаков (dimensionality reduction), с которыми работает уже прогнозирующая модель.
При достаточном объёме размеченной выборки можно первые перенесённые слои донастроить под конечную задачу с небольшим шагом обучения (finetuning).
-
Сжатие данных. Если размерность пространства эмбеддингов существенно меньше размерности исходного пространства признаков , то объекты можно хранить не в исходном виде, а в сжатом - в виде эмбеддинга. Чтобы восстановить сжатый объект до исходного, достаточно просто пропустить его через декодировщик . Поскольку автокодировщик неидеально восстанавливает исходный объект, получим сжатие данных с потерями (lossy compression), аналогично тому, как изображения хранятся в JPEG-формате.
-
Визуализация данных - частный случай снижения размерности, когда размерность эмбеддинга равна двум или трём. В этом случае сложные многомерные данные можно визуализировать для человека.
-
Фильтрация шума (denoising) достигается за счёт пропускания зашумлённого объекта (например, изображения с шумом) через автокодировщик. Удаление шума обеспечивается тем, что автокодировщик хорошо восстанавливает типичные паттерны реальных данных, которые часто встречаются, а шум случаен, поэтому его сложно воспроизвести. Фильтрующий автокодировщик, описанный далее, специально обучается удалять шум.
-
Детекция аномалий (anomaly detection) - задача, в которой нужно выделить нетипичные объекты, выбивающиеся из общего распределения объектов. Она также может решаться с помощью автокодировщика.
Как с помощью автокодировщика детектировать аномальные объекты?
Автокодировщик настраивается хорошо восстанавливать типичные объекты выборки. Нетипичные объекты имеют нестандартное распределение и встречаются редко, поэтому восстанавливаться автокодировщиком будут плохо. Поэтому о степени аномальности объекта можно судить по ошибке его восстановления:
Типы автокодировщиков
Недоопределённый автокодировщик
Недоопределённый автокодировщик (undercomplete autoencoder) обладает свойством, что размерность пространства эмбеддингов меньше пространства исходных признаков:
Ниже показан недоопределённый автокодировщик с одним скрытым слоем.
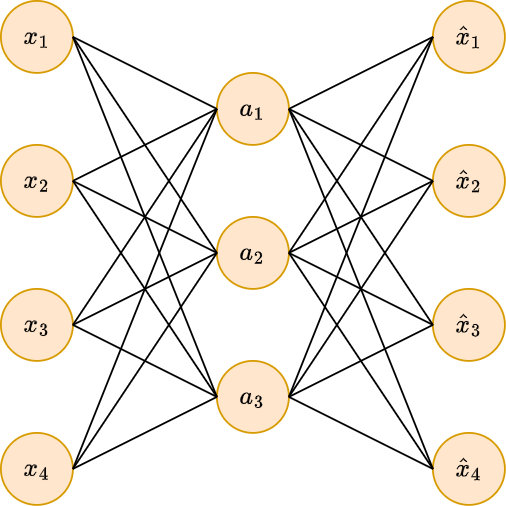
Ед�иничные нейроны здесь и далее опущены для простоты визуализации, но они есть на всех слоях, кроме выходного, чтобы обеспечивать смещение в каждом рассчитываемом нейроне.
Самым популярным методом линейного снижения размерности (dimensionality reduction) является метод главных компонент (principal component analysis [1]), проецирующий объекты на -мерное под�пространство наилучшей аппроксимации, т.е. такое пространство, для которого сумма квадратов расстояний между объектами и их проекциями на это подпространство минимально.
Можно показать [2], что недоопределённый автокодировщик с нейронами на скрытом слое эквивалентен методу главных компонент, то есть выступает проекцией на то же самое подпространство наилучшей аппроксимации, если настройка весов осуществляется согласно (1), а на всех слоях используются тождественные активации.
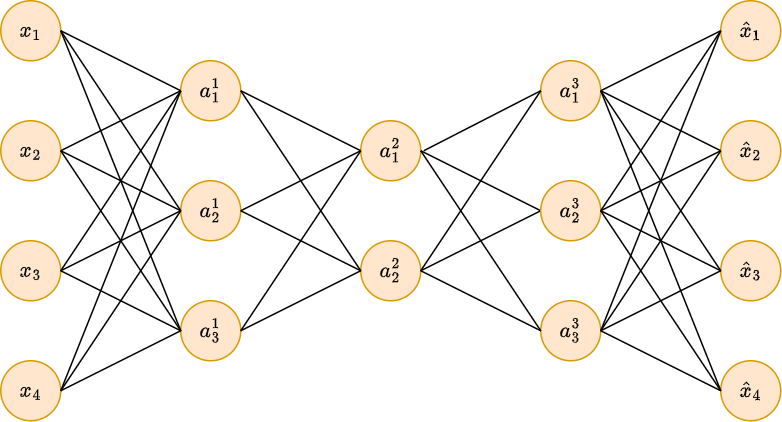
Больший интерес представляет использование глубокого недоопределённого автокодировщика с нелинейными функциями активации - его кодировочная часть позволяет извлекать нелинейные внутренние признаки (non-linear dimensionality reduction)!
Разреженный автокодировщик
Разреженный автокодировщик (sparse autoencoder [3]) добивается невырожденного решения (которым выступает тождественное преобразование ) за счёт модификации функции потерь (1), добавляя в неё L1-регуляризацию на эмбеддинг объекта :
где - гиперпараметр, отвечающий за силу регуляризации. Как и при регуляризации весов модели, использование L1-регуляризации при настройке автокодировщика будет приводит�ь к разреженным эмбеддингам, т.е. эмбеддингам, у которых часть элементов будут в точности равны нулю.
Фильтрующий автокодировщик
Фильтрующий автокодировщик (denoising autoencoder, [4]) избавляется от вырождения автокодировщика в тождественное преобразование за счёт добавления шума к исходному объекту :
При этом в функции потерь требуется восстановление исходного незашумлённого объекта по зашумлённому :
Шум можно добавлять, зануляя отдельные случайные элементы либо добавляя к Гауссов шум (распределённый по нормальному закону с небольшой дисперсией).
Идеи рассмотренных видов автокодировщиков можно совмещать друг с другом!
Маскированный автокодировщик
При применении описанного выше фильтрующего автокодировщика к изображениям признаками выступают пиксели изображения, интенсивность которых меняется плавно, из-за чего фильтрующему автокодировщику становится очень просто восстановить зашумлённые пиксели по их соседям.
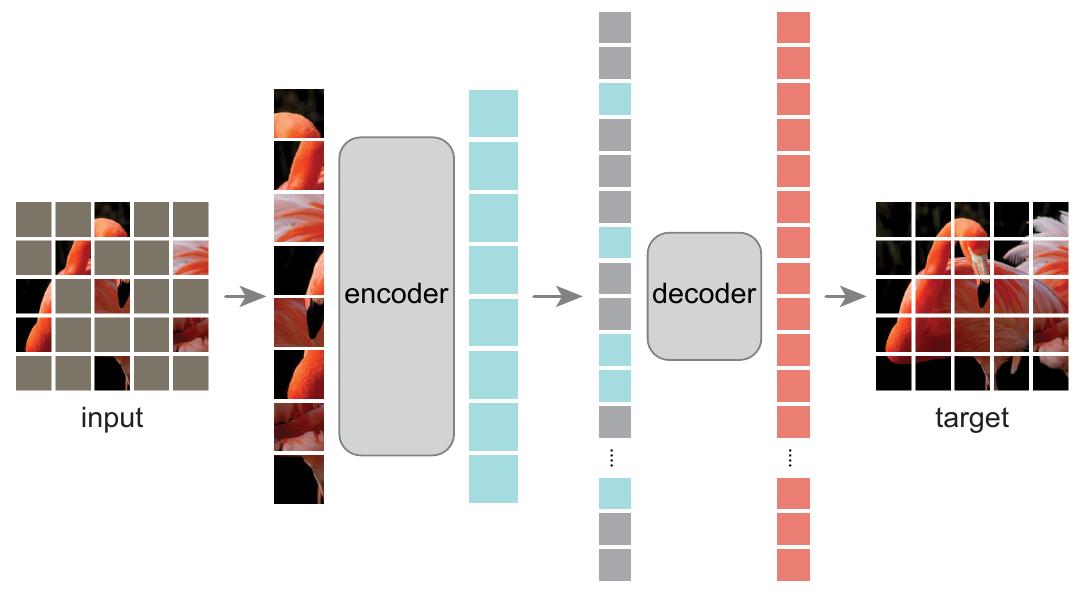
Чтобы заставить автокодировщик решать более сложную задачу (и получать более интеллектуальные эмбеддинги), можно использовать маскированный автокодировщик (masked autoencoder, [5]), в котором в качестве зашумляющего преобразования применяется исключение не отдельных пикселей, а квадратных фрагментов изображения (патчей, patches), как показано на иллюстрации [5]:
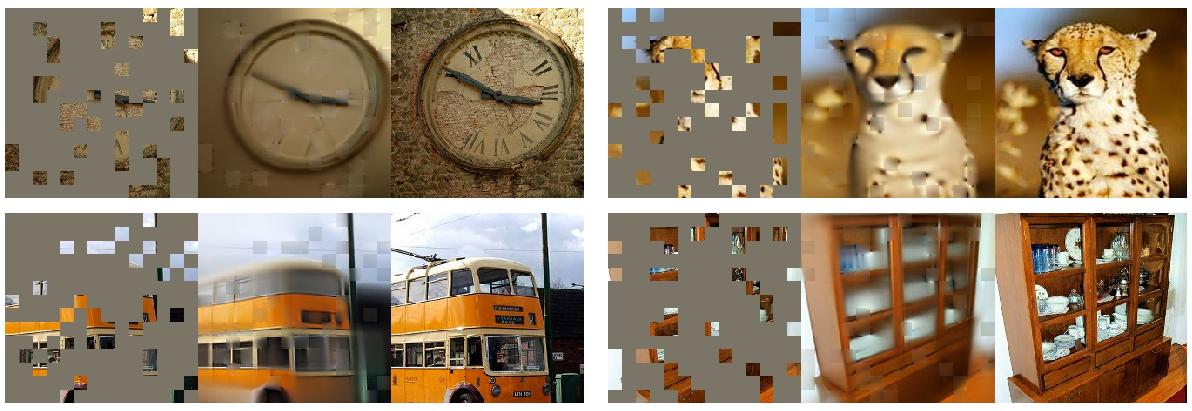
Автокодировщик на базе трансформерной модели (image transformer) позволяет добиться правдоподобного восстановления изображения, даже если 80% фрагментов пропущено [5]:
Сжимающий автокодировщик
Сжимающий автокодировщик (contractive autoencoder, [6]) аналогичен разреженному автокодировщику, но в качестве регуляризатора используется квадрат нормы Фробениуса �от матрицы Якоби (т.е. сумма квадратов элементов матрицы) от эмбеддингов по входным признакам :
Таким образом автокодировщик выучивает эмбеддинг, который будет слабо меняться при изменении входа , что заставит вектора эмбеддингов приближаться к низкор�азмерному многообразию, описывающему разнообразие реальных многомерных данных.
Вариационный автокодировщик
Другой популярный вид автокодировщиков - это вариационный автокодировщик (variational autoencoder, VAE [7]), который учится восстанавливать данные таким образом, чтобы распределение эмбеддингов объектов было близко к выбранному априорному распределению (как правило, нормальному), что позволяет обученный автокодировщик использовать не только для сжатия существующих объектов, но и для генерации новых объектов, восстанавливая их из эмбеддингов, сэмплируемых из выбранного распределения.
Детальнее об автокодировщиках можно прочитать в [8] и [9], а вариационный автокодировщик подробно описан в [10].
Литература
- Wikipedia: Метод главных компонент.
- Bourlard H. Auto-association by multilayer perceptrons and singular value decomposition. – 2000.
- Ranzato M. A. et al. Sparse feature learning for deep belief networks //Advances in neural information processing systems. – 2007. – Т. 20.
- Vincent P. et al. Extracting and composing robust features with denoising autoencoders //Proceedings of the 25th international conference on Machine learning. – 2008. – С. 1096-1103.
- He K. et al. Masked autoencoders are scalable vision learners //Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. – 2022. – С. 16000-16009.
- Rifai S. et al. Contractive auto-encoders: Explicit invariance during feature extraction //Proceedings of the 28th international conference on international conference on machine learning. – 2011. – С. 833-840.
- Pham D., Le T. Auto-Encoding Variational Bayes //arXiv preprint arXiv:1312.6114. – 2013.
- Bishop C. M., Bishop H. Deep learning: Foundations and concepts. – Springer Nature, 2023.
- Goodfellow I. et al. Deep learning. – Cambridge : MIT press, 2016.
- Учебник ШАД: Variational Autoencoder (VAE).