Fully Convolutional Network
Одной из первых нейросетевых архитектур для решения задачи семантической сегментации была модель Fully Convolutional Network (FCN) [1], в которой использовалась полносвёрточная архитектура для семантической сегментации.
Эта архитектура состоит только из свёрток, пулингов, нелинейностей и операций повышения разрешения (upsampling).
Преимуществом архитектуры является то, что она может работать со входным изображением произвольных размеров: увеличение входа будет пропорционально увеличивать размер выхода.
Наилучшее качество работы будет достигаться при применении модели к изображениям того разрешения, которое было максимально представлено в обучающей выборке.
В простейшем случае архитектура могла бы выглядеть следующим образом [1]:
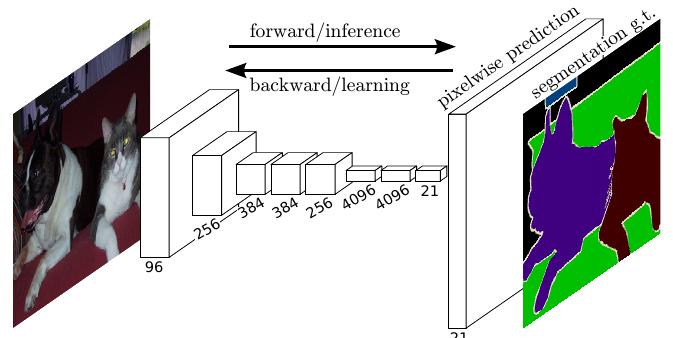
Однако качество сегментации подобной архитектуры будет невысоким вследствие того, что низкоразмерные промежуточные представления после резкого повышения разрешения (последний слой) не способны качественно выделять границы объектов в высоком разрешении.
Хотелось бы как-то совместить высокоуровневые информативные представления низкого разрешения с более простыми промежуточными предст�авлениями с ранних слоёв, имеющих более высокое пространственное разрешение, чтобы точно выделять границы объектов.
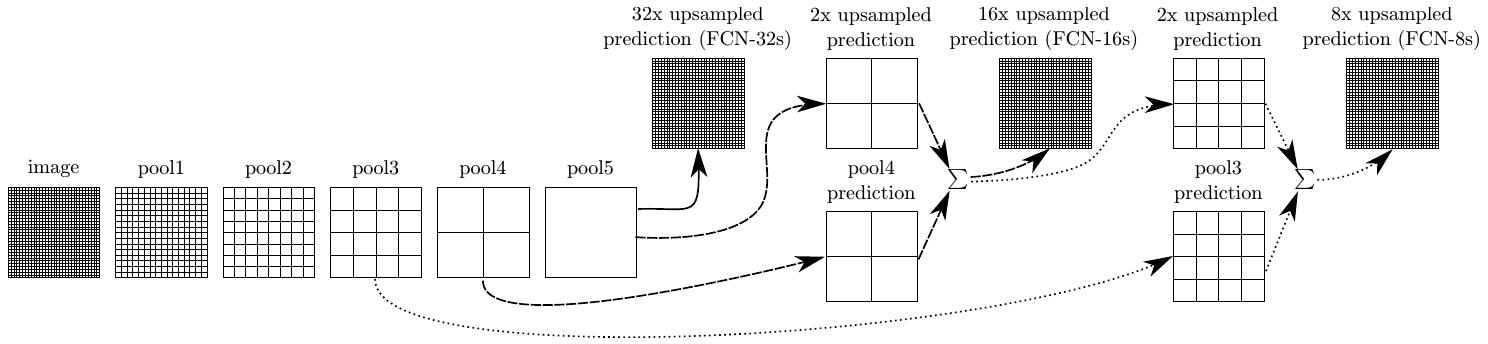
Для этого в FCN предлагается прогнозировать сегментационную карту, используя не только последнее промежуточное представление (FCN-32s), но и предпоследнее. Пространственные размеры обоих прогнозов приводятся в соответствие, используя билинейную интерполяцию и складываются (FCN-16s). Этот же трюк повторяется ещё раз, когда прогнозы строятся по ещё более раннему промежуточному представлению и складываются с прогнозом FCN-16s, что даёт архитектуру FCN-8s.
Графически эта идея продемонстрирована ниже [1]:
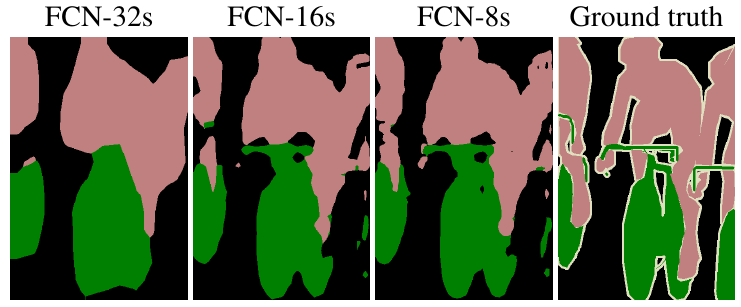
Чем сильнее используется комбинирование прогнозов более поздних и более ранних слоёв, тем точнее работает сегментация [1]: