Учёт контекста
Недостатком классических архитектур для задачи семантической сегментации является то, что они основаны на свёртках, имеющих ограниченную область видимости (receptive field). Из-за этого сегментация производится слишком локально, не учитывая более широкий контекст всего изображения.
Например, при сегментации изображения катера на реке, он может ошибочно относиться к классу "машина", потому что он имеет похожий капот и стёкла. Но если бы нейросеть могла видеть более широкий контекст (что вокруг изображена вода), то она не стала бы относить катер к классу "машина".
Учитывать более широкий контекст можно, увеличивая число свёрточных слоёв. Тогда более поздние свёртки будут иметь более широкую область видимости. Однако это приводит к большему числу вычислений и усложняет настройку сетей.
Для эффективного учёта контекста можно использовать свёртки со сдвигом (dilation) больше единицы либо учитывать результаты пирамидального пулинга, что реализуется в моделях, описанных далее.
PSPNet
Модель PSPNet [1] позволяет повысить точность семантической сегментации за счёт использования более глобального контекста, чем область видимости свёрток. Это достигается тем, что промежуточное представление, по которому производится сегментация, состоит из
-
промежуточного представления классификатора ResNet101 со свёртками со сдвигом (dilation) больше единицы;
-
выходов пирамидального пулинга, растянутых до пространственных размеров промежуточного представления из ResNet101.
Графически схема PSPNet показана ниже [1]:
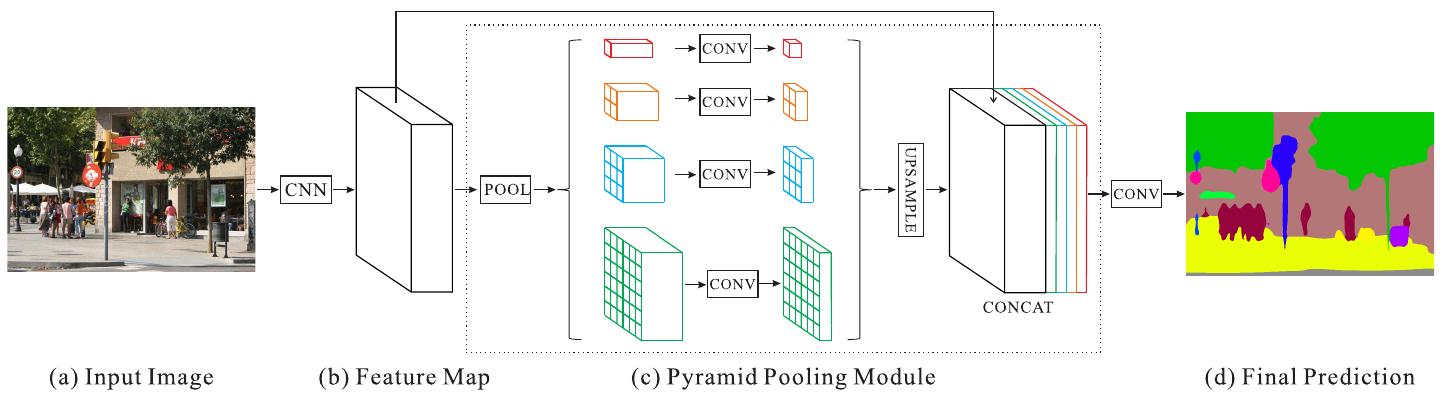
Использовалось 4 слоя пирамидального пулинга с сетками 1x1, 2x2, 3x3, 6x6. Для того, чтобы уменьшить число каналов, получаемых из пирамидального пулинга, признаки пулинга пропускались через свёртки 1x1, снижающие число каналов в 4 раза.
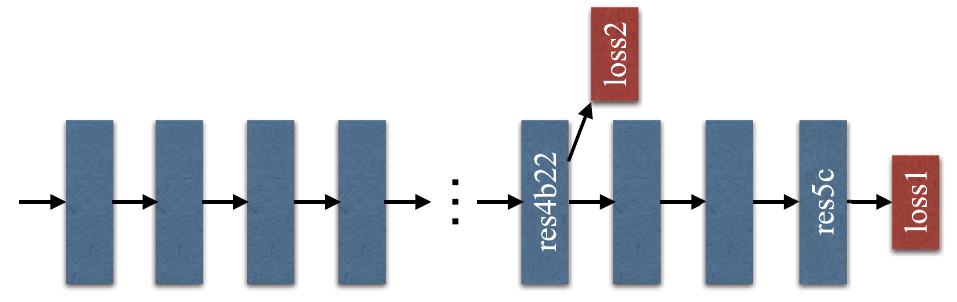
Кодировщик ResNet101 обучался на задачу классификации. Для более эффективной настройки во время его обучения использовались потери классификации как в конце сети, так и в середине (принцип deep supervision), что графически показано на рисунке:
Использование свёрток со сдвигом больше единицы (dilation>1) дополнительно повышало область видимости свёрток, заставляя их использовать более широкий контекст исходного изображения.
DeepLab
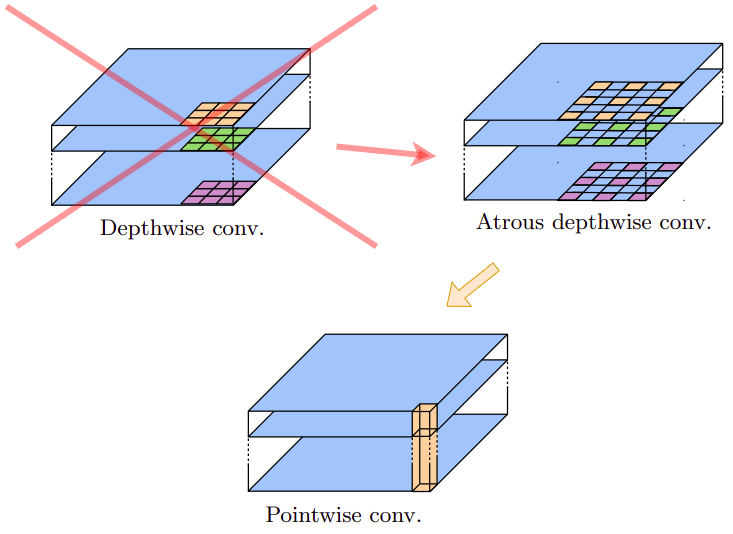
DeepLab представляет собой серию моделей версии 1,2,3,3+ с постепенным улучшением качества. Рассмотрим DeepLab v3+ [2]. Для извлечения промежуточного признакового описания использовались свёрточные слои архитектуры Xception, основанной на использовании поканальных сепарабельных свёрток (depthwise separable convolutions), состоящих из поканальных свёрток, поверх которых действовали свёртки 1x1. В DeepLab v3+ поканальные свёртки шли со сдвигом (dilation) больше единицы и назывались Atrous convolutions.
Графически произведённая замена показана ниже [2]:
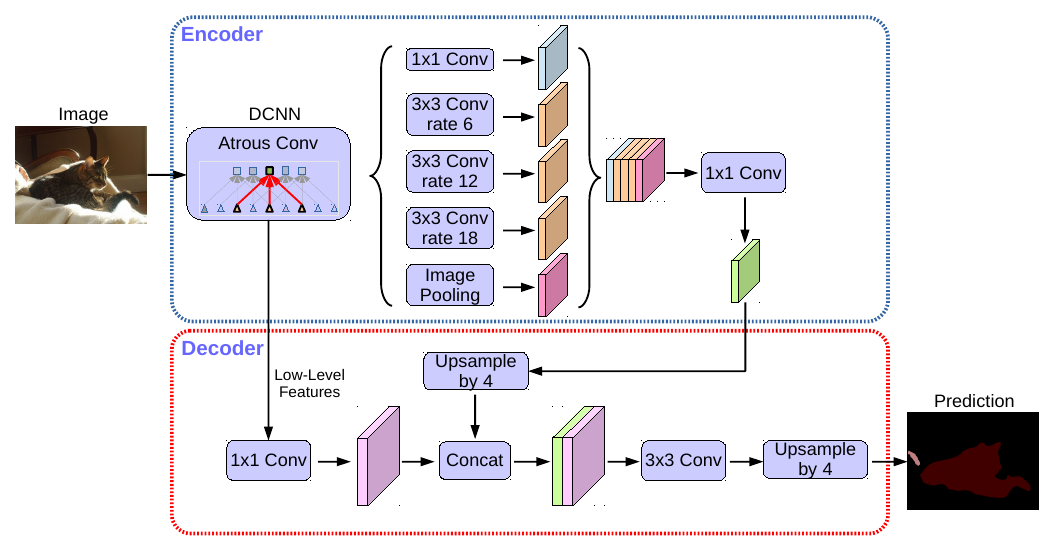
Также в DeepLab v3+ параллельно использовался набор свёрток с разным сдвигом: dilation=6,12,18, которые дополнялись признаками из глобального пулинга. Эта конструкция была названа Atrous Spatial Pyramid Pooling (ASPP).
Архитектура DeepLab v3+ целиком показана ниже [2]:
А еще ниже показан стэк из свёрток с разным сдвигом (для архитектуры DeepLab v2) [3]:
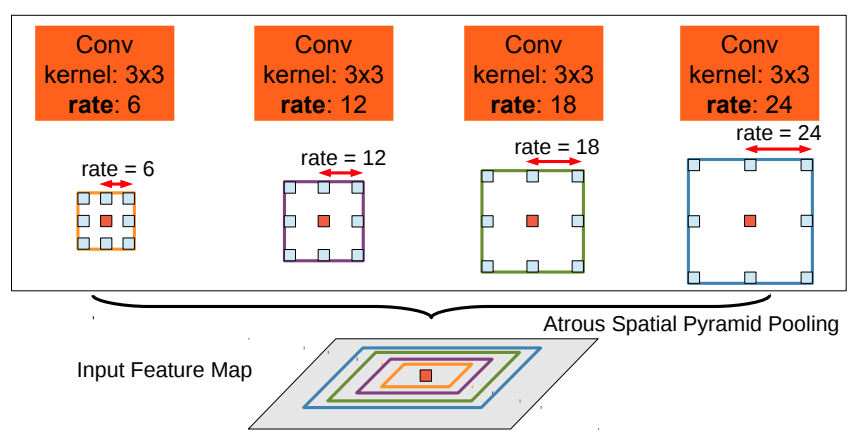
Результаты действия свёрток с разными сдвигами конкатенировались и дополнялись признаками, полученными с глобального пулинга.
Всё это позволило при сегментации пикселей учитывать как локальные контексты разного размера, так и глобальный контекст в целом.
Далее в архитектуре число каналов снижалось свёртками 1x1. Для улучшенного сохранения информации о границах объектов, низкоуровневые признаки с промежуточного слоя кодировщика конкатенировались с промежуточным представлением декодировщика.
Литература
- Zhao H. et al. Pyramid scene parsing network //Proceedings of the IEEE conference on computer vision and pattern recognition. – 2017. – С. 2881-2890.
- Chen L. C. et al. Encoder-decoder with atrous separable convolution for semantic image segmentation //Proceedings of the European conference on computer vision (ECCV). – 2018. – С. 801-818.
- Chen L. C. et al. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs //IEEE transactions on pattern analysis and machine intelligence. – 2017. – Т. 40. – №. 4. – С. 834-848.