Деформируемые архитектуры
Традиционные архитектуры по семантической сегментации и детекции объектов оперируют свёртками, имеющими квадратную область видимости (receptive field), где сторона квадрата - это размер ядра свёртки. Аналогично при построении эмбеддингов регионов интереса используется пирамидальный либо ROI-пулинг), агрегирующий активации только по прямоугольной окрестности.
При этом реальный объект на изображении может быть произвольной формы, например, круглой или вытянутой. Вследствие этого сигнал, поступающий снаружи детектируемого объекта, зашумляет ответ, снижая точность распознавания.
Для более таргетного извлечения информации только с фактической области, на которой расположен объект, используется деформируемая свёртка и деформируемый ROI-пулинг.
Деформируемая свёртка
В деформирумой свёртке (deformable convolution) [1] используются адаптивные сдвиги, автоматически настраиваемые другим модулем сети, как показано на рисунке [1]:
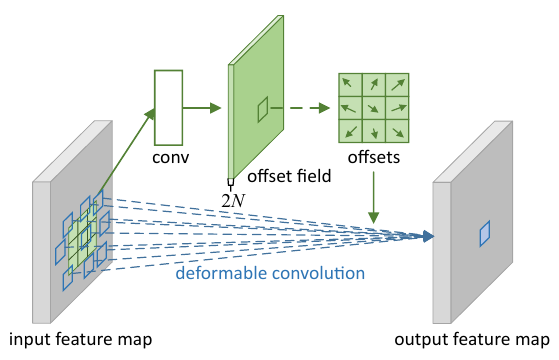
Для прогнозирования сдвигов используется внешний свёрточный слой из свёртки того же размера, что и базовая свёртка, для которой сдвиги предсказываются. Для каждой позиции этот слой предсказывает сдвиги по оси X и по оси Y - ядро основной свёртки прикладывается при поэлементном перемножении на активации не равно�мерно, а с учётом предсказанных сдвигов.
В результате свёртка извлекает признак присутствия объекта более точно за счёт улучшенной локализации на объекте [1]:
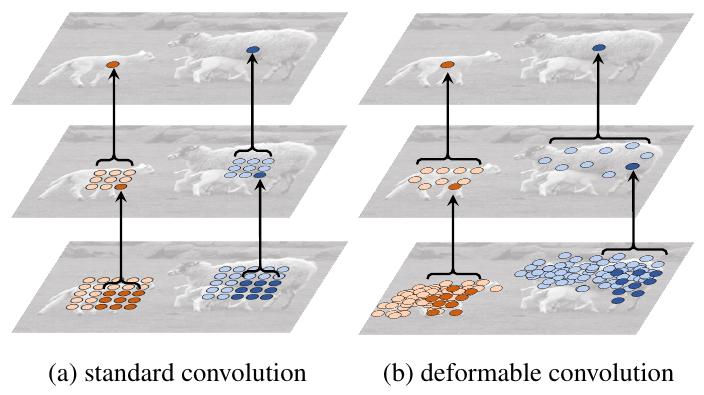
Использование деформируемой свёртки позволило повысить точность семантической сегментации.
Деформируемый ROI pooling
В двухстадийных детекторах, таких как Faster R-CNN, используется операция ROI pooling, в которой к региону интереса (region proposal) на карте признаков применяется один слой пирамидального пулинга, например, сеткой 3x3, а в каждой области сетки ищется максимальное либо среднее значение по каждому каналу.
Регион интереса представляет собой прямоугольную область, что в общем случае не соответствует реальной форме детектируемого объекта. Поэтому в [1] предлагается ввести дополнительный модуль, который по признакам, извлечённым традиционным ROI-пулингом, используя дополнительный полносвязный либо свёрточный слой, предсказывающий смещения областей агрегации, по которым будет работать основной блок ROI-пулинга. Эта схема названа деформируемым ROI пулингом (deformable ROI pooling) и проиллюстрирована ниже:
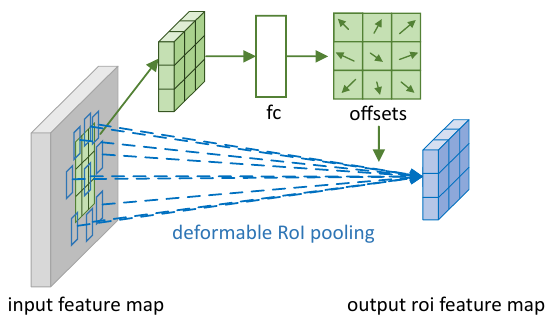
Сдвиги предсказываются не абсолютные, а относительные (относительно ширины и высоты сдвигаемого региона), чтобы метод мог работать инвариантно с регионами разного размера.
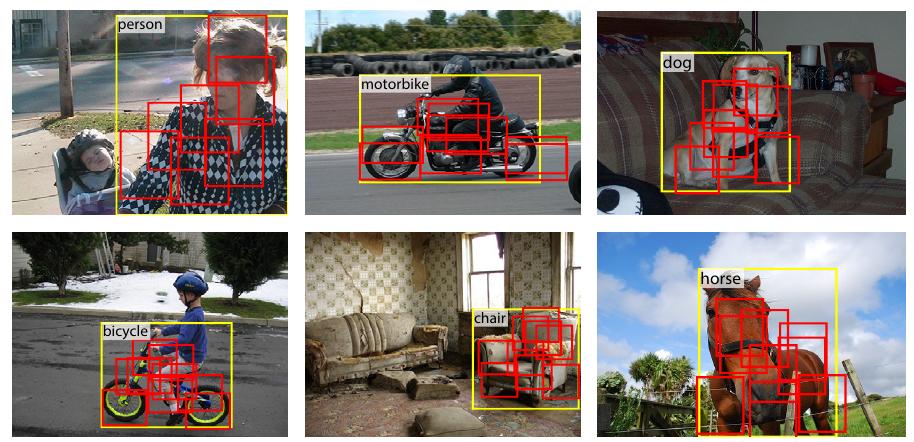
Использование деформируемого ROI-пулинга позволило повысить точность детекции за счёт более таргетной настройки области видимости ROI-пулинга на распол�ожение детектируемого объекта, как показано ниже [1]: